 loading
loading
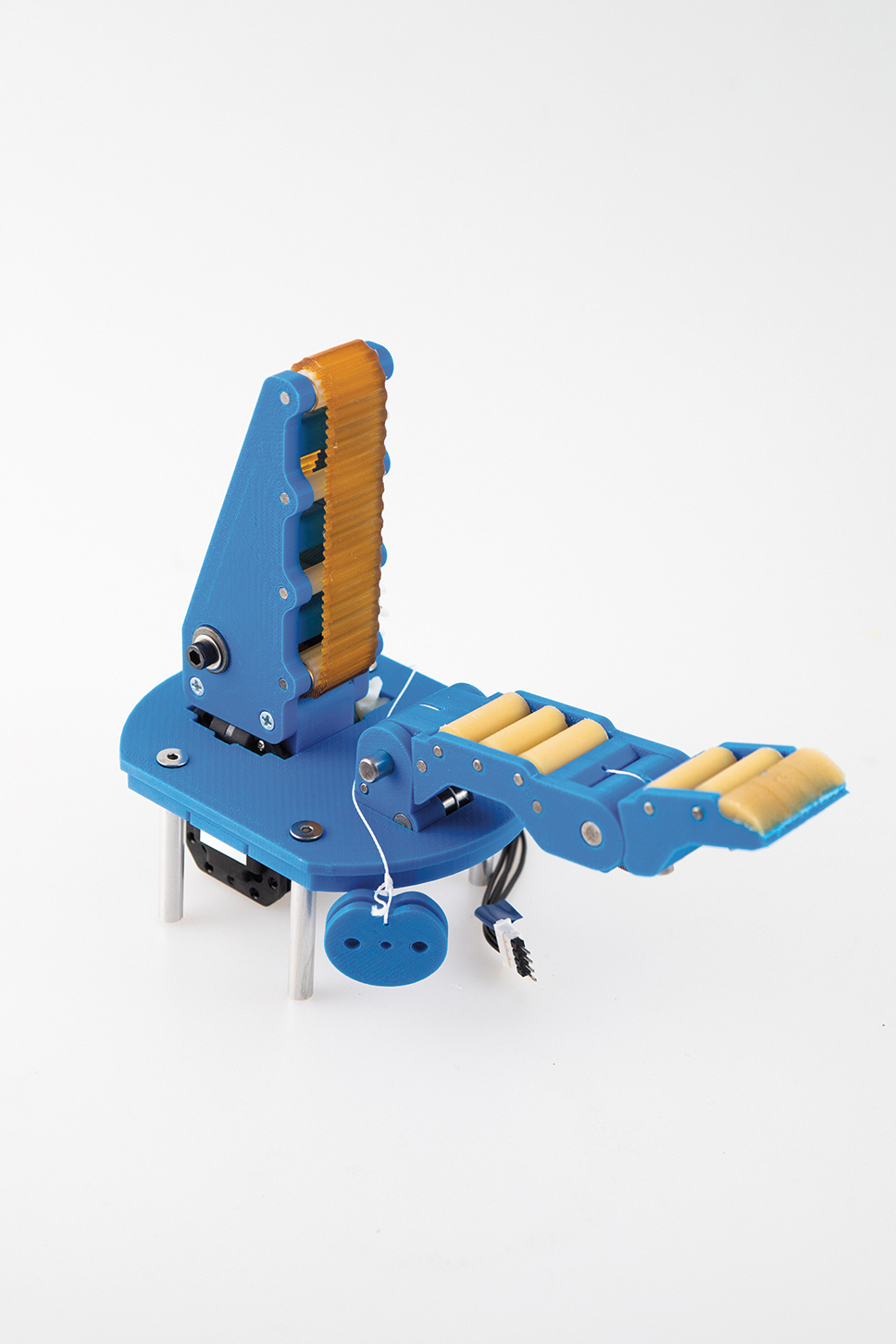
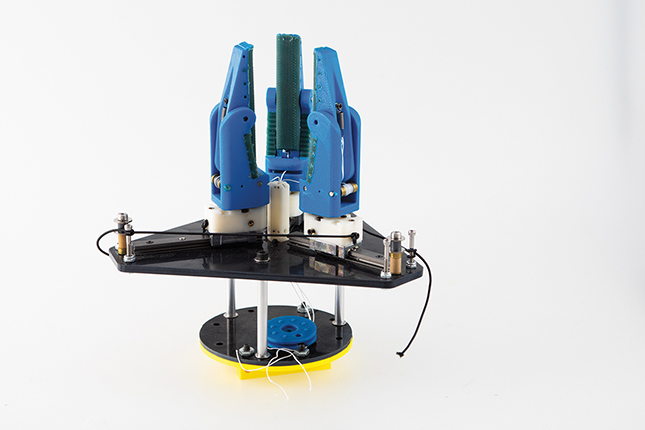
featuresWithin reachRobotics has long tried to mimic the human hand. Yale engineer Aaron Dollar thinks there’s a better way. Dylan Walsh ’11MEM is a freelance writer based in Chicago who covers science and criminal justice.  Mark OstowEngineering professor Aaron Dollar, a good sport, posed for us with a claw machine in a local bowling alley. The robotic hands he designs are far more sophisticated, but he does strive for simplicity. View full imageAs a kid, Aaron Dollar liked math and physics, but he fell harder for the arts—sculpture in particular, because it provided a formal outlet for his impulse to build things. He arrived as a freshman at the University of Massachusetts–Amherst eyeing a major in fine art. The housing lottery landed him adjacent to a cluster of engineering buildings on the northeast edge of campus. “At the time, I literally thought engineers were guys who drove trains,” he says. His roommate was a mechanical engineer, as was his best friend in the dorm, and when Dollar realized that engineers, like sculptors, built things, and that they were paid a salary to build things in a way that sculptors rarely were, he reconsidered his options. Just 15 years after this realization, in 2010, MIT’s Technology Review named Dollar one of the top 35 innovators under 35. He was by then a professor of mechanical engineering at Yale, and he had made his name by creating several robotic hands that broke the rules of what a robotic hand ought to be. His designs were flexible; they contained no sensors; they were lightweight, inexpensive, simply made. And yet, unlike other robotic hands, they could grasp a huge range of objects without being preprogrammed to calculate the motions. From robot “pickers” in commercial warehouses to prostheses for people, Dollar’s unorthodoxy shimmered with potential. “Aaron’s work, starting with his PhD and continuing through Yale, has changed the way people think about what makes a useful robotic hand,” says Robert Howe, his graduate school adviser at Harvard. Dollar tries to tackle projects that “make things work differently,” Howe says. “He does things that change the world.” Immediately after college, Dollar entered Howe’s biorobotics lab, where he joined a multi-university effort to create a multi-legged robot inspired by the small wonder of cockroach locomotion. When people traverse a rocky field, they plan their movement carefully, measuring and sensing the terrain with each step. This process relies on the powerful and intricate software of our nervous system to guide the hardware of our body. Cockroaches, in contrast, “just kind of run like crazy,” Dollar says; they move too quickly to sense the placement of their feet. Remaining upright depends instead on the pliability and springiness of their legs. Cockroaches solve the problem of movement not with powerful software, but with precisely evolved hardware. Researchers on the team pored over this physiology in hopes of applying it to their robotic bug, which they affectionately named Sprawlita. Dollar’s main charge was considering how to translate the genius of cockroach legs into the function of a robotic hand. “It was a minor thing the team talked about doing,” Dollar says, but it came to shape his professional future. Dollar, 41, is tall, with a loping walk, his hair swept up in a mini-mohawk—a cool nerd. Now an associate professor of mechanical engineering and materials science at Yale, he is also director of the GRAB Lab. (GRAB is a somewhat tortured acronym for “Grasping & Manipulation, Rehabilitation Robotics, and Biomechanics.”) One part of the lab occupies an airy two-story room in Mason Laboratory, the desks and shelves overloaded, a remote-controlled helicopter suspended from the ceiling. Another part of the lab, also richly stocked and disorganized, sits elsewhere in Mason off a subterranean fluorescent-lit hallway, a freestanding glass case of prosthetic hands on prominent display. Human hands are marvels of engineering. With them we can grasp a book or turn a key, play Bach on piano or Hendrix on guitar, show affection for those we love, climb rock faces and cook dinner, then wake the next day to perform life-saving surgery. Our hands contain roughly one quarter of the bones in our body, along with dozens of joints, muscles, and tendons. For a long time, admiring roboticists have tried to replicate what they see: to design a grasping machine indistinguishable from the hands that built it. They have crafted intricate joints with pins and rods and motors. They have made four slender fingers and one opposable thumb. Dollar’s early work at Harvard was influenced by this lineage. But when he couldn’t get metal components to flex as he wanted—as cockroach legs do—he turned to a polymer molding technique invented by Stanford roboticist Mark Cutkosky that allowed for the seamless integration of hard and soft plastics. This showed more promise. Dollar refined the work, embedding metal cables to serve as tendons, one per joint in rough imitation of our hands. Idly playing with a prototype one day, he stumbled upon the revelation that launched his career. As Dollar toyed with the cables in the hand, he noticed that pulling the tendon that actuated a finger’s distal joint—the knuckle farthest from the palm—caused both the middle and distal knuckles to curl inward, allowing the finger to passively wrap around any object without the need for sensors or computation. So what purpose, he wondered, did the tendon attached to the middle knuckle serve? Could he simplify the finger to work with one tendon? What about a whole hand that operated with a single tendon? “As much as you can do with as little complexity as possible is going to make everything better,” he says. Dollar eventually developed a four-fingered hand—each finger with two joints, the whole thing operated by a single tendon. The fingers were made of a combination of soft, rubbery plastic and hard plastic. They sat in opposition to each other, like crab pincers, two fingers per side; at rest, palm skyward, the hand relaxed into a shallow U shape. A pulley at the base of the hand evenly distributed force across the fingers. One motor drove the whole hand, which contained no sensors. It ultimately resembled a sophisticated version of those metal claws that hover over bins of stuffed animals. And yet it worked with surprising facility. As part of his dissertation, Dollar recorded the hand completing tasks. He begins one demonstration by solidly tapping the hand with a hammer. The fingers bend and shudder and fall back in place. The test continues. Standing off-screen, Dollar places a volleyball into the bowl of the upturned fingers. They close. Successful grasp. Dollar next places the volleyball off-center. The fingers close. Successful grasp. He tries a block of wood, then a lightbulb. Successful grasps. In a second video, Dollar operates the hand by remote control; he lifts a CD from its spindle, a drill by its grip. He raises a wine glass half-filled with red wine. Not a drop spills.
 Mark OstowWhat could you do with an extra hand? Aaron Dollar’s research focuses on how to make mechanical servants more effective. View full imageDollar’s adviser was not initially wowed with the demonstration. Most people watching the video wouldn’t be. The apparent simplicity of Dollar’s work both explains and obscures its import. Since the 1970s, the world of robotics has striven for emulation. “Lots of people are still trying to build exact copies of the human hand,” Dollar says. And though plenty of groups have come close in movement and appearance, Dollar has yet to see something that truly operates like a human hand. Even if such a close likeness were achievable, he wonders, with some skepticism, whether it would be desirable. First of all, biological hands are made of bone, tendon, nerve, and flesh, all manipulated by the pull of contracting muscles. Robotic hands are made of plastic and metal and are controlled by gears and rotational motors. If design emanates from material, there’s no obvious reason for an engineered hand to mimic a product of natural evolution. Consider a horse; consider a car. Beyond this, the miracle of the hand is overshadowed by the greater miracle of its sensory operator—eyes that see, nerves that feel, a brain that directs. A mechanical copy of the human hand requires not only immensely complicated hardware, but even more complicated software capable of navigating the unmeasured chaos of our world. This is where roboticists tend to focus their attention: on software that controls movement. To lift a mug of coffee, for instance, vision software first confirms that an object is, in fact, a mug. More software determines where the mug is in space and moves toward it, monitoring the hand’s precise position relative to the mug. Upon contact, sensors measure how firmly to grasp. And so forth. For a robot to reliably do this in human environments with today’s technology, Dollar says, is essentially impossible. Pack the most advanced sensors into a hand, support it with the most sophisticated software, and robots still can’t follow the daily routines of a four-year-old. Even if adequate technology did exist, it would be prohibitively expensive, and it would introduce frailty: sensors fail, software errs. “Besides, there is a great deal of evidence that this is not how living organisms work,” says Lael Odhner, who worked with Dollar in the GRAB Lab for six years before cofounding RightHand Robotics, a company that designs robots for picking and sorting items in retail warehouses. “We’re not performing elaborate computational models with every move. When we pick something up, we look, reach, grab, and leave part of the work to the hardware.” Dollar travels this same path, stripping whatever he can of technology in commitment to a hand that grasps with a simple command: reach and grab. He wants a hand that operates while blind to the world. This is the lesson of cockroaches, carried forward.
Scientists and inventors throughout the history of robotics have called from the fringe for greater focus on hardware. But the idea has recently gained a wider audience, spreading across academic labs and commercial startups. Odhner attributes this propagation to Dollar and a handful of other young university faculty who “staked their tenure cases on the idea.” Dollar, for his part, quietly proselytized by convening hardware-focused meetings at robotics conferences and editing special issues of engineering journals. In 2012, after coleading a team that won one of DARPA’s Autonomous Robotic Manipulation challenges, he posted blueprints for the hand online. He has since formalized this push for open access with the Yale OpenHand Project, which offers five designs for download. “If we’re going to innovate in hardware,” Dollar says, the next question should be, “How can other people benefit from that innovation?” In the GRAB Lab, one of Dollar’s central concerns is rehabilitation. The 41,000 Americans with a major upper-limb amputation currently have access to two kinds of prostheses: simple body-powered devices, which are manually operated by placing tension on straps slung around the user’s torso, and myoelectric devices, which look like hands and operate by interpreting the electrical impulses of remnant arm muscles. The former are lightweight and cost hundreds of dollars; the latter are heavy and run into the tens of thousands of dollars. Neither, it seems, is particularly well liked. One estimate suggests that up to half of all amputees abandon their prosthesis within a year. Dollar and his students are working toward a middle ground—a dexterous hand that is lightweight, and hopefully affordable—through mechanical austerity. Other projects in the GRAB Lab are born and shaped by Dollar’s intellectual wanderlust. He has guided work on novel sensors, robotic graspers for the deep sea, and robotic “building bricks” that snap together to creat larger and more complex robots. He is developing a taxonomy of human grasp types and has studied the dexterity of our early hominid ancestors. He developed a 3D-printable chain that assembles into a lattice for lightweight construction. Jobs in the private sector hold little appeal for him since, provided research funding, “I can basically choose my own adventure,” Dollar says. In 2014, he took a yearlong leave to study raptor talons, which have simplified through evolution in much the same way that Dollar wants to simplify hands. Over the course of that project, he became an avid birder, which awakened a concern for environmental conservation. He is now working with students and collaborators on projects such as an inexpensive sensor for measuring carbon dioxide in waterways. Such productive curiosity earned him an invitation last year to MARS, a symposium hosted by Jeff Bezos to convene people who are thinking creatively about the future and give them space to talk. True to form, Dollar dutifully avoided discussion about robots with other roboticists—“I see them all the time”—in favor of new topics. (He also engaged Michael J. Fox in a brief cocktail chat and tried his hand at dogfighting in a two-seater prop plane. He lost the dogfight.) If you spend time with someone who thinks about hands for a living, soon enough the background magic of their dexterity comes to the foreground. Everything you do becomes a source of distraction, whether tying your shoe or mindlessly lifting and twirling a pencil. The precise and subtle and continuous manipulations that occur so automatically are thrust into high relief. You slow your hands down and watch very closely. You try to decode the mechanics at work, where the friction comes from, and how the forces are interacting. Robotic hands of the future may work as well as the human hand. Perhaps they will surpass its ability in every way—faster, stronger, and more precise. The great wonder, though, is not the possibility that this may come to pass, but that our hands, as they are, already perform with such effortless grace.
|

|
 1 comment
1 comment Print
Print Email
Email



1 comment
-

Jack Frederick`, 10:28pm February 26 2019 |  Flag as inappropriate
Flag as inappropriate
The comment period has expired.very impressive work young man